国际著名学术期刊《Accident Analysis & Prevention》2024年12月刊发表我院学者的论文《通过增强新手驾驶员的风险感知能力提高自动驾驶接管绩效》(Identifying novice drivers in need of hazard perception ability improvement for takeover performance in Level 3 automated driving)。我院柴晨副教授为通讯、第二作者,2023级博士生翁士璇为第一作者,论文的合作作者包括华为技术有限公司尹苇如、同济大学医学院王艳波老师。

Weng, S., Chai, C., Yin, W., Wang, Y. (2024). Identifying novice drivers in need of hazard perception ability improvement for takeover performance in Level 3 automated driving. Accident Analysis & Prevention. 208:107803.
摘要:
接管绩效是L3级自动驾驶技术落地的关键制约因素。在紧急控制权切换情境下,并非所有驾驶人都能够采取适当的策略接管车辆控制权。新手驾驶人危险感知能力的个体差异可能影响紧急接管绩效。本研究旨在通过分析具有不同危险感知能力的新手驾驶人的紧急接管绩效提升接管安全性。40名新手驾驶人在驾驶模拟器中完成了紧急切入场景下的接管测试,并通过危险感知测试评估了危险感知能力。研究基于实验数据构建了调节效应模型。结果表明,危险感知能力间接影响了接管反应与转向行为之间的相关关系。危险感知能力较强的驾驶人更不容易在紧急接管时猛打方向盘。作用区间分析结果表明,39.8%的参与者需要提升其危险感知能力(危险感知测试的标准化z分数大于0.002)。研究结果能够帮助有效识别需要接受危险感知培训的个体以提升接管绩效,这为优化驾驶人培训框架提供了重要理论依据。
关键词: L3级自动驾驶 紧急接管 新手驾驶人 危险感知 调节效应
研究贡献:
本研究首次通过调节效应模型分析了驾驶人危险感知能力对接管绩效的影响,提供了危险感知测试识别紧急接管绩效不佳且需要提升危险感知能力的驾驶人的理论依据。相比对所有驾驶人进行统一培训,识别需要接受培训的个体能够节约人力和物力资源,实现L3级自动驾驶环境下的精准培训,提升绩效优化效率,增强接管安全性。
研究背景:
随着技术的发展和相关法规的出台,L3级自动驾驶车辆逐步实现量产并进入道路交通系统。2023年11月,中国四部委联合发布了《关于开展智能网联汽车准入和上路通行试点工作的通知》,为L3级自动驾驶的商业化运行提供了政策支持。L3级自动驾驶虽然能够在特定条件下监控环境并完成动态驾驶任务,但在遇到无法处理的交通状况(超出运行设计域)时会向驾驶人发出接管请求。驾驶人在接管过程中需要重新感知交通环境并做出正确的决策,而紧急接管请求往往留给驾驶人较短的时间,这可能导致他们表现出不安全的接管行为。
个体差异被认为是影响接管安全的重要因素。已有研究表明,L3级自动驾驶环境下的平均接管时间从1.14秒到30秒不等。驾驶人的个体特征不仅影响接管反应时间,还显著影响接管过程中的转向行为和碰撞概率。驾驶人的危险感知能力是指驾驶人识别和应对潜在交通危险的能力。实验证据表明,危险感知能力不足的驾驶人接管时反应更慢,表现出更不恰当的车辆控制行为。因此,有必要分析危险感知能力对接管绩效的具体影响,识别需要进行针对性训练的驾驶人,从而提升接管安全性。
研究方法:
(1)危险感知测试
本文通过危险感知测试评估新手驾驶人的危险感知能力。测试视频中包括了中国道路环境中常见的不同类型的潜在危险,驾驶人需要在感知到威胁驾驶安全的危险时摁下暂停键。标准化处理后的危险感知时间z分数用于评估驾驶人的危险感知能力。
(2)紧急接管驾驶模拟实验
本文搭建了L3级自动驾驶仿真平台并开展紧急接管驾驶模拟实验(图1),其中的紧急接管事件由相邻车道车辆紧急切入触发(图2)。驾驶人需要在自动驾驶模式下完成非驾驶任务,并在系统发出接管请求时接管车辆控制。通过眼动仪和皮肤电反应生理仪监测驾驶人接管过程中的生理反应。实验通过随机分组和场景顺序的反向设计,避免顺序效应;同时,通过设置随机的非接管切入事件减弱驾驶人在实验过程中的学习效应(图3)。
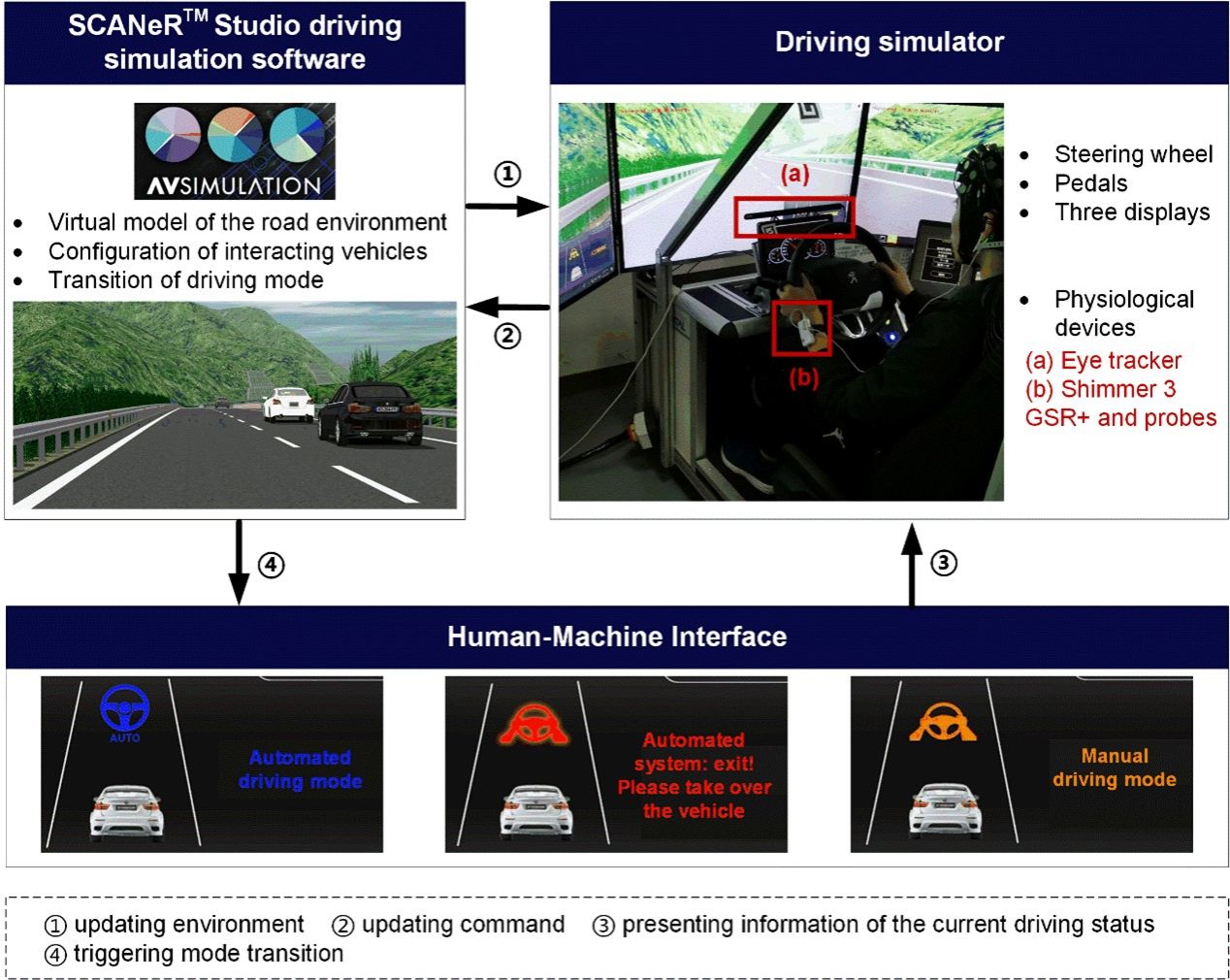
图1 L3级自动驾驶仿真平台
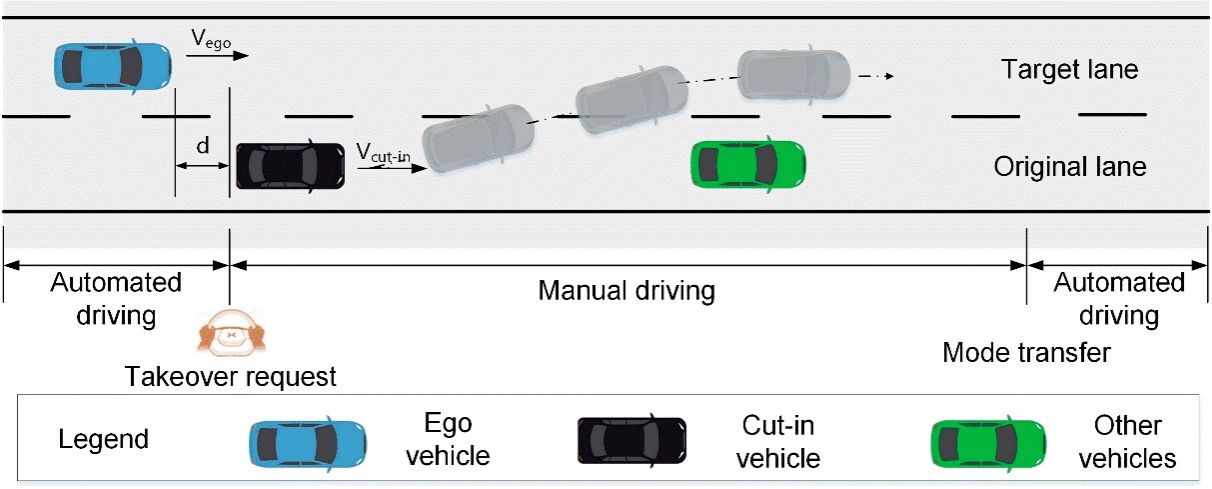
图2 接管触发场景示意图
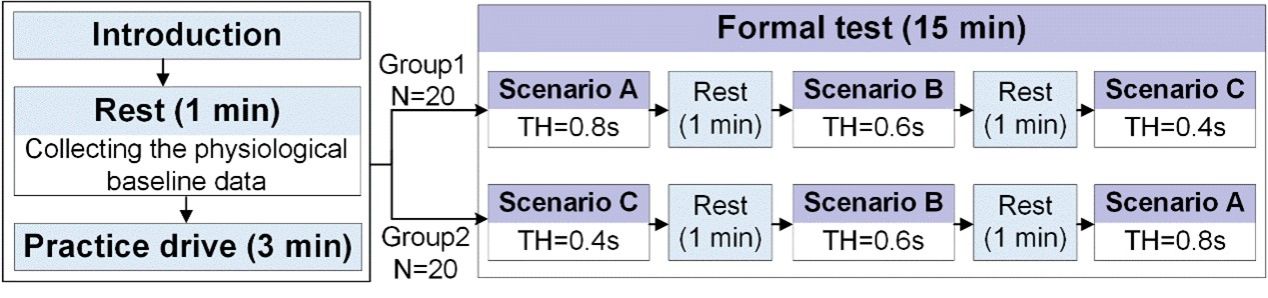
图3 实验流程
主要结论:
(1)调节效应分析
本研究构建了两个调节效应模型,其中HPT为驾驶人的危险感知时间,PTRoad为第一次看道路的时间,RTTakeover为接管反应时间,SteerAngleMAX为最大方向盘转角(图4)。当危险感知能力不同时,紧急接管过程中驾驶人第一次看道路的时间对接管反应时间的影响以及接管反应时间对最大方向盘转角的影响会发生变化。当驾驶人的危险感知能力较强时,接管反应时间对最大方向盘转角的影响不再显著。
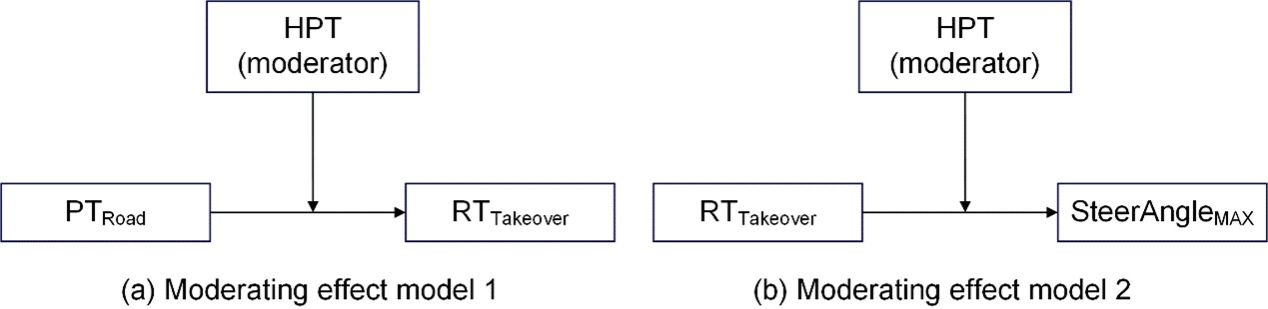
图4 调节效应模型
(2)作用区间分析结果
进一步通过Johnson-Neyman分析,本文确定了接管绩效指标间关系从显著变为不显著的危险感知时间取值临界点,该值代表了加强新手驾驶人接管绩效时提升危险感知能力的上限。从接管反应到转向行为的过程中,接管反应时间对最大方向盘转角的影响显著性在HPT=0.002时发生变化(图5(b))。根据该临界值,39.8%危险感知能力较弱的驾驶人的最大方向盘转角与接管反应时间正相关;而对于60.2%危险感知能力较强的驾驶人,其转向行为不再受到较长的接管反应时间的显著制约。当危险感知能力提高至这一临界值以上,即使接管反应时间稍长,驾驶人也不太可能急转方向盘。因此,对于39.8%危险感知能力低于临界值的驾驶人仍需要提升其危险感知能力。
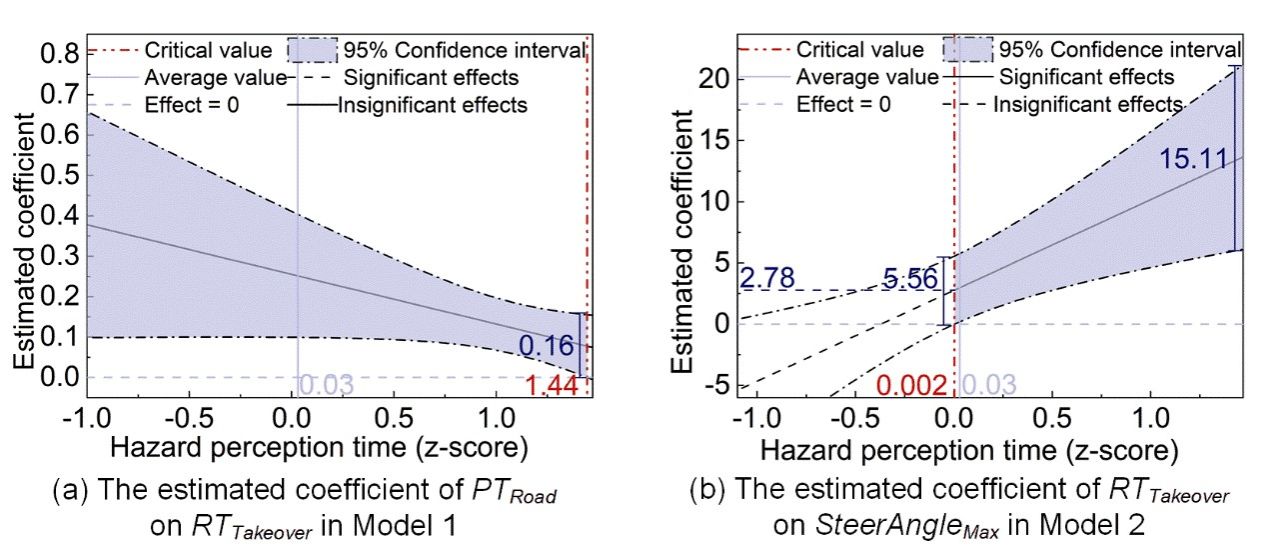
图5 调节效应作用区间分析结果
后续研究:
未来研究可进一步探讨危险感知能力对接管绩效的调节效应在不同驾驶经验人群中的适用性。本文的研究结果可支持个性化的驾驶培训与事故预防,通过危险感知测试识别个体,定制针对性驾驶培训课程,提高效率。同时,可能为推动危险感知测试纳入驾考提供理论依据。从系统设计层面,未来可能需要为危险感知能力不足的驾驶人提供更长的接管时间预算或不良接管行为预警,提升系统与驾驶人的交互效率。