高速公路是国家服务民生发展与经济建设的重要载体,也是推进国家战略目标的有力支撑。截止2021年底,我国高速公路里程已突破16万千米,居世界首位。然而,随着高速公路里程的快速增长,如何利用先进的传感、计算、通讯技术与提高其服务能力与自动化水平是下一代智慧高速亟待解决的关键问题。
近几年来,在《交通强国建设纲要》《推进智慧交通发展行动计划》《关于加快推进新一代国家交通控制网和智慧公路试点的通知》等政策的助推下,以浙江、湖南、山东等省份为代表全国各地区组织开展了大量的智慧高速公路建设探索性工作,取得了丰厚的成果。
智慧高速公路的内涵与框架直接影响了其建设的功能与成效,明晰新一代智慧高速公路系统的战略定位,将智慧交通系统中车路耦合的发展路径考虑到智慧高速的规划与建设中,将有效提高其先进性与适用性,对我国交通运输发展意义重大。
智慧高速公路的概念早在20世纪40年代就已在国际上提出。自20世纪90年代起,美国逐步推出了自动高速公路系统(Automated Highway System, AHS)、弗吉尼亚智慧公路项目(Smart Road)、加州的I-80 SMART项目等多个智能公路设施项目,并逐步在车-路通讯、性能监测、能源回收、自动驾驶、信息交互等关键功能模块上进行了技术突破和测试应用。
日本自20世纪90年代开始开展大量智能交通系统研制工作,并在车辆信息与通信系统(VICS)、电子收费系统(ETC)以及先进安全车辆系统(ASV)等功能方面取得了突出性成果,并已在全国范围内形成统一规范标准,明确了以车路通讯为基础的智慧公路建设方向。
欧洲在20世纪中叶开启智能道路基础设施研究,其主要以绿色、安全、可持续角度出发,包括著名的“尤里卡”计划、Easyway、Forever Open Road项目等。从国际典型国家与地区的智慧高速公路应用来看,主要是利用设施传感等技术实现路域环境的精准感知,并结合不同的通讯载体进行信息交互,从而实现限定场景的自动驾驶、安全保障与可持续发展等功能。
我国当前智慧高速公路建设主要从伴随式信息服务、自动驾驶辅助以及精细化养护运营三个方面展开。浙江省集合自由流收费、无线充电、自动驾驶、设施管养等技术于一体打造全程161千米的超级高速,驾驶时速有望超过120千米。湖南长沙绕城高速等项目建设共113千米智慧高速,通过5G通讯等技术实现对车路状态的精准掌握,从而满足无人驾驶的路况要求。广西以北斗高精定位网为依托打造具备车辆引导、安全监控、设施数字化等功能的智慧高速体系。山东开展了国内首个面向自动驾驶的齐鲁交通智能网联高速公路测试基地,利用先进的激光雷达、微波雷达、全景监控、分布式传感等技术赋能路侧基础设施,为自动驾驶编队行驶提供信息保障。
虽然我国在智慧高速功能应用与建设上取得了突飞猛进的成就,但在智慧高速的内涵与定义缺乏统一、客观、全面的理解,导致智慧公路在不同区域标准不一、模式多样,大范围推广应用受限。

同济大学交通运输工程学院教授,博士生导师,担任国际期刊《Journal of Advanced Transportation》副主编、《同济大学学报(自然科学版)》编委、中国公路学会青年专家委员会委员、中国公路学会交通工程分会常务理事、中国智能交通协会智慧公路专业委员会委员、中国人工智能学会智慧交通专业委员会理事、上海市青年科技人才协会理事、上海市公路学会道路工程专业委员会副主任委员,先后入选教育部新世纪人才支持计划、交通运输部青年科技英才、上海市优秀学术带头人计划,获第十一届中国公路青年科技奖。主要研究领域为:智能交通系统、基础设施数字化、车路协同等。
杜豫川教授和团队成员刘成龙、吴荻非、赵聪梳理了公路系统的车路耦合发展脉络,诠释了新一代智慧高速公路内涵与框架。
PART1:新一代智慧高速公路内涵
“新一代智慧高速的构建内涵主要分为四个层次:广域全息感知、数字孪生刻画、车路协同应用以及高效可信通讯。”
1.1公路系统车路耦合发展路径:从以往的发展“弱耦合”到功能“强耦合”逐渐过渡。
道路是车辆的载体,从公路系统的发展与演变历程来看,其呈现出明显的“耦合”发展趋势,每一次公路技术形态的升级转变都受到汽车行业进步与用户需求激增的影响。因此,在设计新一代智慧高速公路的体系架构中,须充分考虑汽车行业的发展现状。
上个世纪中期世界第一台电动汽车诞生,标志了车辆作为新型交通工具迈入历史舞台。在随后的一百余年,1886年燃油汽车诞生、1901年柏油碎石路的推广、1932年世界第一条高速公路的建成、1988年我国第一条高速公路建成,标志着汽车工业逐步向平民化、快速化、信息化发展。
21世纪以来,车辆发展的“新四化”特征对现有高速公路体系提出了新要求,网联化、自动化等发展趋势更加增强了车路之间的耦合关系,促进了车路协同等技术的发展,车路系统从以往的发展“弱耦合”到功能“强耦合”逐渐过渡。因此,新一代智慧高速的技术内涵与体系框架需充分考虑汽车产业的发展趋势与功能需求。

图1 车路耦合技术形态发展过程
1.2新一代智慧高速的技术特征:在土地资源趋近饱和的条件下,为满足日益增长的交通需求,通过智能化的传感、分析、通讯等手段,提高高速公路通行能力,满足新一代载运工具设施要求的全新技术形态。
用户需求是带动公路系统技术形态升级的根本动力,公路系统的技术形态升级从物理与数字特性出发,主要可以分为三个阶段:普通公路阶段、高速公路阶段,以及智慧高速阶段。20世纪初,燃油车的快速发展需求推动了公路路面由碎石路升级为硬化路面。在该阶段,通过路面硬化和路幅拓宽使得普通公路单车道的通行能力提升至600-800 pcu/h,行驶速度可达40-60 km/h,但路权特性还尚未明确划分,多数公路仍以多种交通方式混合为代表。
土地资源不断扩展和人民活动范围的扩大进一步提升了人民对通行时间的要求。因此,20世纪30年代,高速公路系统应运而生。在此阶段,公路单车道通行能力扩大到1800-2400 pcu/h,并将车速提升至80-120 km/h。其技术特征主要以车道分离、路权集中、全线封闭与固定匝道等物理特性为主,旨在通过建立专属、高质的车辆高速驾驶环境大幅度提高道路的通行能力。
随着土地资源逐渐饱和以及车辆性能的不断提高,其对公路的通行能力、信息感知、节能减排等方面产生了新的需求。基于新兴的全要素感知技术与低时延的通讯技术可以进一步缩小车头时距,并保证车辆队列行驶安全稳定。据估算,智慧高速的通行能力可跃迁式地提升至3000-3500 pcu/h,行驶速度超过120 km/h。其技术特征主要以全息传感、数字孪生、车路协同等数字特性为主,旨在在现有设施条件下利用信息化手段充分发挥道路的供能潜力。
因此,与单纯的公路设施智慧化不同,新一代智慧高速公路是在土地资源趋近饱和的条件下,为满足日益增长的交通需求,通过智能化的传感、分析、通讯等手段,提高高速公路通行能力,满足新一代载运工具设施要求的全新技术形态。

图2 公路系统技术形态升级历程
1.3新一代智慧高速的系统内涵:分为四个层次:广域全息感知、数字孪生刻画、车路协同应用以及高效可信通讯。
新一代智慧高速的系统内涵主要面向使用者与管理者两个维度。对于使用者而言,其服务功能随着自动驾驶等级也会有所差异。对于L2级自动化及以下的人工主导的驾驶车辆,智慧高速主要为其提供可靠的信息服务支持,例如自由流收费、恶劣天气的安全预警、路径与速度诱导等;对于L3-L4级半自动驾驶车辆,智慧高速主要为其提供感知增强或感知冗余功能,从而保障车辆的行驶安全与效率;对于L5级的全自动驾驶车辆,智慧高速主要从宏观调度角度协同控制车队行驶,保障车辆在低时距、高速度下的行驶稳定性与可靠性。

图3 不同服务对象的智慧高速服务功能
对于管理者而言,智慧高速主要通过对静态设施与动态车辆的状态实时监测,从而进行公路设施的全寿命养护管理与优化等工作,提高应急事件响应能力,保障系统稳定高效地运营。基于以上需求,新一代智慧高速的构建内涵主要分为四个层次:广域全息感知、数字孪生刻画、车路协同应用以及高效可信通讯。
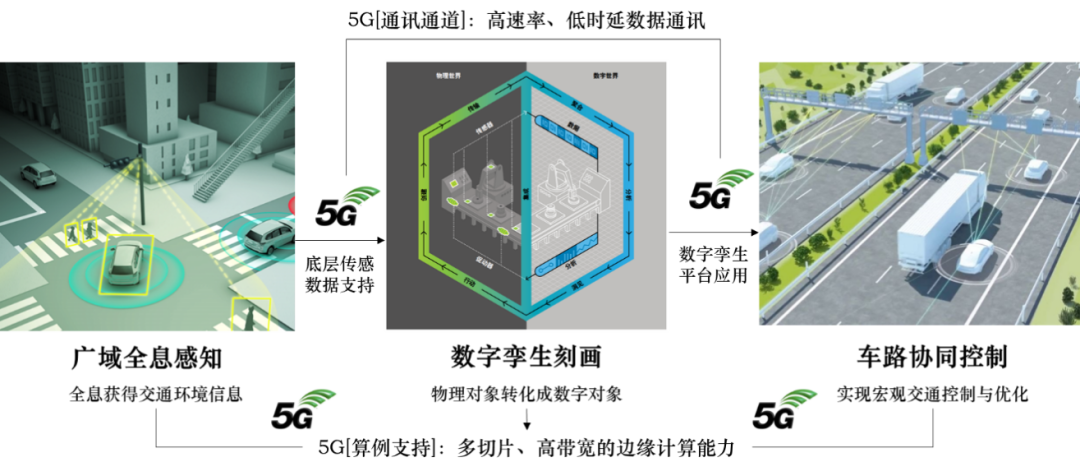
新一代智慧高速的系统架构主要从三方面对传统的智慧高速系统进行了提升:
一是打通底层感知数据链路,将离散化的数据采集方式转化为系统化的广域全息感知,并依照数据属性对其进行分类与融合;
二是通过数字孪生技术连通底层感知与上层应用,建立面向功能需求的数字刻画与分析处理平台,从而可以依据不同阶段的需求调整与设计不同的功能模块,提升了系统的可持续性与普适性;
三是从车路协同、运营管理等角度展开智慧高速顶层应用,提高了智慧高速管理的全面性与可靠性。
PART2:新一代智慧高速的系统架构
“新一代智慧高速的系统架构依据其包含逻辑功能、物理实体和应用类型可分为逻辑架构、物理架构和应用架构。逻辑架构描述了智慧高速系统的功能模块和交互逻辑,物理架构解释了智慧高速的系统的物理构成、数据模式和信息链路,应用架构解释了智慧高速系统的实际的工程应用类型。”
2.1新一代智慧高速的逻辑架构:核心在于依托全息感知网络和数字孪生平台实现智慧高速物理系统和信息系统的闭环、一体化协同管控。
基于新一代智慧高速的系统内涵的智慧高速逻辑架构,其核心在于依托全息感知网络和数字孪生平台实现智慧高速物理系统和信息系统的闭环、一体化协同管控。各类基础设施、交通运行以及环境的动态、静态数据通过底层感知网络采集后,在数字孪生管理平台中进行融合集成,形成标准化、规范化的数据仓库,并组建构成智慧高速的信息系统,以数据资源的形式服务智慧高速应用系统。
数字孪生平台具备虚拟模型搭建、大数据解析、平行仿真推演等功能,智慧高速应用系统可依据具体的实施场景,从数字孪生层中调取相应的数据资源和算法,实现特定的智慧高速功能。底层感知网络和数字孪生管理平台则需保证较好的兼容性和可移植性,有利于推动智慧高速的产业化发展。

图 5 新一代智慧高速的逻辑架构
2.2新一代智慧高速的物理架构:数据资源是新一代智慧高速的核心驱动,为支撑新一代智慧高速的建设和运营,需要明确数据资源的物理属性,进而指导智慧高速物理系统中感知设备、存储方式、解析技术、信息交互方法的选用和研发。
面向新一代智慧高速的技术内涵构建其物理架构,底层感知网络由各类车载式、架站式、嵌入式智能化感知设备构成。依据智慧公路的物理组成和应用特征,可将智慧高速的底层感知网络划分为基础设施数字化、交通运行状态感知、能源和环境等外部信息的高频采集三方面内容。
数字孪生管理平台由基础数据库(数据存储模块)、基础平台、分析中心、业务平台等物理要素组成,以“高精数字底图+多维动态数据”的模式进行表达,将底层感知网络的物理实体以数字化形式映射和管理。其中,基础数据库是数字化基础设施信息、运行状态、能源环境等海量多源异构数据的管理中心,其核心在保证物理实体与虚拟实体的数据同步;各类数据按照规范的数据模式在基础平台中进行呈现,构建智慧高速的物理虚拟模型;分析中心的角色在于实现多源异构数据的解析和推演,其核心在于算法仓库的构建;业务平台则直接与顶层的应用系统对接,其核心在于打通数据的应用路径。
信息传输网络是连通整体物理架构的纽带,其包括底层感知网络与数字孪生平台直接的数据上传,以及应用系统中的数据应用。同时,基于5G等高带宽、强切片能力的通讯网络也赋予了系统强大的算力,搭建云边融合的数据分析与发布体系,满足车路协同对于数据的鲜度需求。
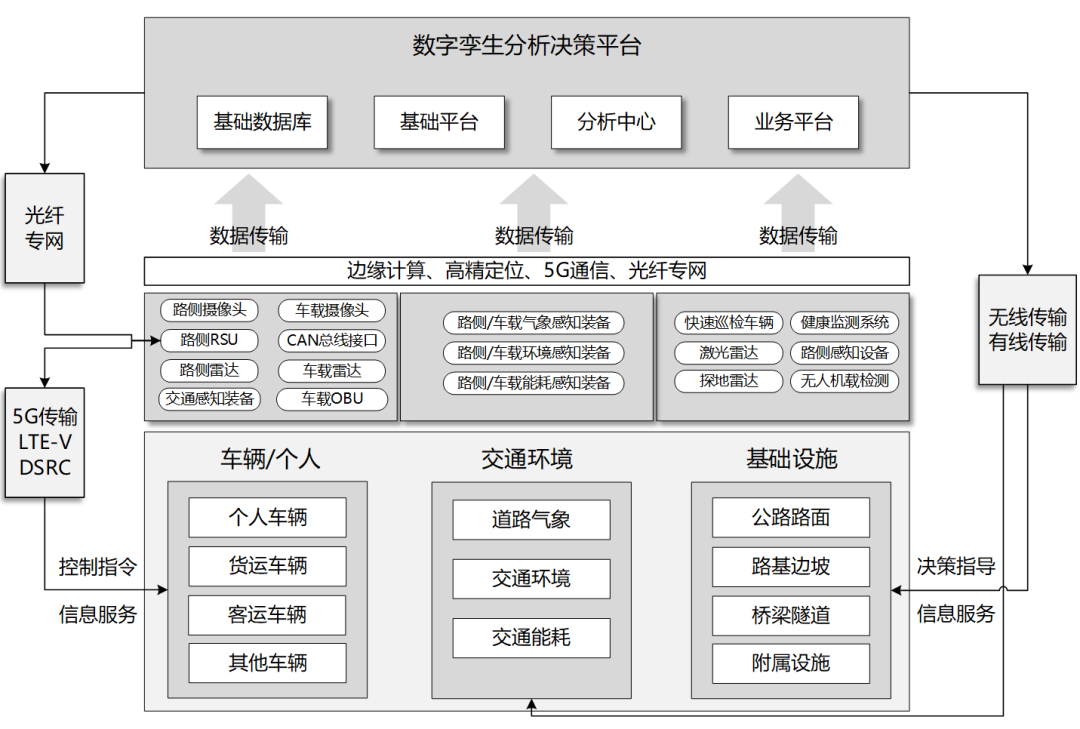
图6 新一代智慧高速的物理架构
数据资源是新一代智慧高速的核心驱动,为支撑新一代智慧高速的建设和运营,需要明确数据资源的物理属性,进而指导智慧高速物理系统中感知设备、存储方式、解析技术、信息交互方法的选用和研发。为面向智慧高速系统中的各类应用,结构化数据应具备精度、维度、鲜度等三个物理属性,分别指代数据的精细化程度、信息类别和更新频率。
数据的物理属性是决定现阶段智慧高速技术架构和智慧高速未来发展途径的重要因素。数据精度明确了感知设备和定位设备的技术要求、布设方式、数据解析要求;数据维度明确了感知设备的选型、数据融合方式和知识拾取技术;数据鲜度则直接约束了通讯网络信息交互模式,包括设备选型、传输模式、组网形式。不同的智慧高速应用场景对各类数据资源的物理属性要求不同。

表1 智慧高速应用系统的数据属性要求
2.4新一代智慧高速的应用架构:采用数据驱动的新型业务模式。
从业务应用视角,智慧高速的核心功能和应用模式可归纳为管理、控制、养护、服务、车路协同五个方面。面向各类应用模式,需构建完善的智慧高速业务架构。
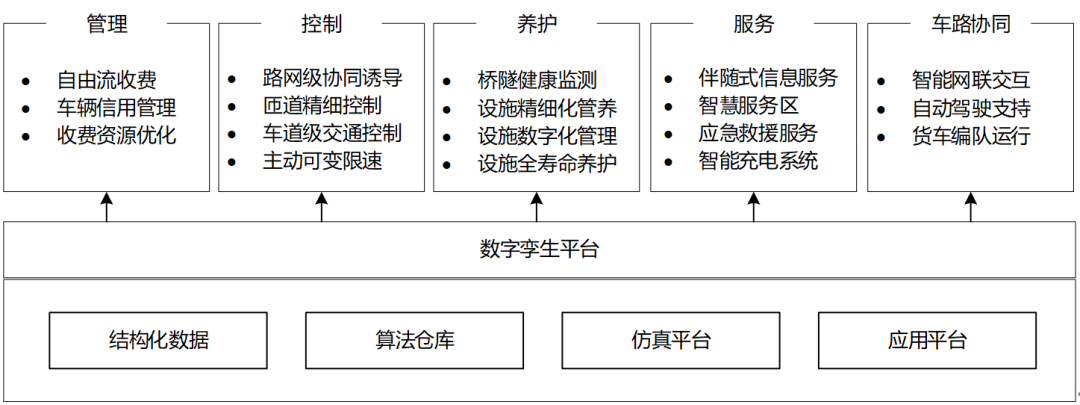
图7 新一代智慧高速的顶层业务架构
新一代智慧高速的业务架构采用的是数据驱动的新型业务模式。顶层的应用通过指定的数据接口获取标准结构的数据流,在数字孪生平台中进行解析、仿真、推演,最终形成不同的应用模式。
例如,面向交通管理部门时,管理部门可接入实时的路网流量信息和车辆ETC信息,实现自由流收费、车辆信用管理、收费资源优化等功能;面向路政管养时,管养部门通过接入动态的基础设施性能状态数据,结合原始设计资料,有效服务于设施的精细化、全寿命管养,实现基础设施的闭环管理;面向个人驾驶用户时,个人行驶车辆可接入实时的交通状态、设施状态、气象状态信息,结合车辆本身的各类状态参数,实现伴随式信息服务、智能充电、服务区智能诱导等功能。
PART3:新一代智慧高速推进路径
“智慧高速公路的发展将经历数字化、网联化、全息化三个主要阶段。”
3.1新一代智慧高速车路耦合发展路径:车路协同系统将经历驾驶辅助、智能网联和群体协同三个主要发展阶段。
新一代智慧高速公路是一个车与路相互促进、相互协调的过程,需依赖车路耦合技术升级共同构筑,其成熟的时间既取决于车辆技术水平发展,也取决于公路设施技术的进步。先进的车与落后的路组合会导致效能提升成本昂贵,难以规模化应用;先进的路与落后的组合会严重限制道路效能优势的发挥。
从数字孪生层出发,智慧高速公路的发展将经历数字化、网联化、全息化三个主要阶段。数字化阶段将实现对高速公路静态永久数据对象(道路几何特征、车道类型、车道连通性等)、静态临时数据对象(路域设施性能、交通安全设施完整性等)的高精度描述,形成高精度数字底板。网联化阶段将实现对高速公路动态临时数据对象的收集和分享,形成动态高精度地图。全息化阶段将实现对高速公路内高度动态数据对象的实时感知,形成局部高度动态地图。在智慧高速公路三个不同发展阶段可与智能网联汽车形成不同的协同化系统及应用。
车辆从非自动驾驶逐渐向部分自动驾驶、有条件自动驾驶、高度自动驾驶发展,高速公路将逐渐从传统的物理结构向数字化、网联化和全息化方向发展,在车路强耦合的发展过程中,车路协同系统将经历驾驶辅助、智能网联和群体协同三个主要发展阶段。
在驾驶辅助阶段,部分自动驾驶车辆依托数字化的高速公路,可以实现高精度定位、自适应巡航、车道保持辅助、车道偏离预警等功能,提升驾驶安全性;
在智能网联阶段,有条件自动驾驶车辆依托数字化和网联化的高速公路,可以实现道路施工、事故点等提醒,弯道提醒、可变限速等虚拟路牌,救护车、消防车等紧急车辆避让,和协同自适应巡航控制等功能,通过人机共驾方式兼顾驾驶安全与效率;
在群体协同阶段,高度自动驾驶车辆依托数字化、网联化和全息化的高速公路,可以实现超视距感知与碰撞预警、匝道协同汇入、卡车编队全自动驾驶等协同自动化功能,可以实现高速公路交通运行系统最优,大幅度提升道路的通行能力和运行效率。
新一代智慧高速系统发展的三个阶段并不意味着所有高速公路只有完成驾驶辅助和智能网联后再发展群体协同。在车路协同应用推广过程中,不同等级的自动驾驶车辆与不同等级的智慧高速公路组合可以实现从基础的信息交互到最终的群体协同管控等功能。智慧高速与自动驾驶间的等级匹配关系并非同等级对应,而是组合对应。

图8 车辆自动驾驶等级与智慧高速等级组合效果
考虑车路能级组合目标,新一代智慧高速的智慧化等级主要分为六个级别。

表2 高速公路智慧化等级划分
与自动驾驶等级划分类似,智慧的道路基础设施由于部署的感知设备,提供的应用功能的不同,也可划分成不同的智慧化等级(R0-R5)。如图7所示,对于L0等级的传统车辆而言,即便最高等级R5的智慧高速也无法使车辆实现具备自动驾驶功能;而对于R0的无智慧设施公路,L5等级单车智能的车辆也无法实现车路通讯。随着车辆自动驾驶等级提升,智慧高速路侧设施逐步为车辆赋能,使其实现从信息交互到群体协同的升级。在车辆和道路智能化等级叠加升级的过程中,通过功能耦合,形成了三大面向应用的场景。
图8中相同颜色背景代表基本具有相似的能力。例如L4等级的车辆与R5等级的道路组合,可以实现L5等级的车辆与R3等级的道路组合相同的群体协同效果。在实现同一功能应用下,更高智能等级车路的功能更稳定,但同时成本也更高。充分结合车路能级组合,采用车路耦合发展路径,更适应于面向大众的商业推广。
新一代智慧高速公路利用信息化手段有望重塑现有高速公路体系,从通行能力、运行车速、行驶安全、设施管养等各方面提升现有公路系统的服务水平,发掘物理设施的效能潜力。作为一种新的技术形态,其推进路径需要从系统角度与车路耦合角度出发,明晰不同发展阶段智慧高速的发育形态,把握智慧高速建设内容与智能驾驶技术应用节奏的同步性。因此,针对实际建设应用过程存在的问题,未来解决途径和研究方向可从以下方向展开:
(1)目前部分智慧高速功能“超时代”,与现有交通系统兼容性差。在智慧高速设计与建设中,部分场景应用主要面向L4及以上自动驾驶车辆,需布设大量外置辅助设施。但由于缺乏应用对象,现阶段布设过多路侧辅助设施难以发挥智慧高速的服务价值,甚至导致现有设施资源被侵占。建议根据区域的智慧高速建设目标,设置不同阶段的主要建设内容,例如在车路通讯方面,宜首先面向低等级自动驾驶车辆提供信息服务,并通过不断的技术更迭与升级,后期服务于高等级自动驾驶车辆,远期服务于车路协同控制等,考虑现阶段智能设施的持续性升级,服务当前车辆主体的同时,做好中远期技术与资源储备。
(2)现有智慧高速设计与建设方案场景单一,缺乏统筹性考虑。新一代智慧高速公路作为一种新型技术形态应在底层满足规范化的建设特征,而顶层满足多样化的功能场景需求。目前,许多相关工程主要面向某单一场景进行设计,没有发挥底层复杂的感知技术与传输技术的实际效用。需充分整合现有资源,打造满足智慧高速技术内涵的功能集成体系,在系统规划时加入数字孪生层,汇聚基础设施感知数据,并基于孪生平台的动态信息统筹设计多样化的场景应用,分阶段、分层式实施应用板块构建。
(3)智慧高速的底层信息技术缺乏统一的数据规范与标准,应用迁移性与复制性较差。由于智慧高速公路建设仍处于探索阶段,在数据类型、数据格式、接口协议、通讯手段等方式上存在地域差异。因此,应基于现有成熟案例,从顶层设计出发,建立统一化的数据接口、采集路径和传输技术,提升智慧高速的可兼容性和可拓展性。
(4)目前的智慧高速应用如车路协同、超视距感知、安全增强等虽然取得了一系列的研究成果与工程实践,但在通讯稳定性、诱导有效性与信息安全等方面存在一定问题,尤其面向高频发、高并发的多终端交互环境。因此,下阶段的研究工作需提高不同场景下车路协同系统的稳定性和时效性,并重点解决系统的面向外部攻击的鲁棒性与用户隐私保障等问题。